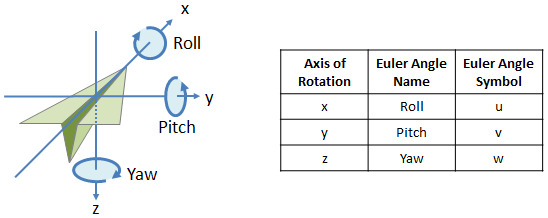
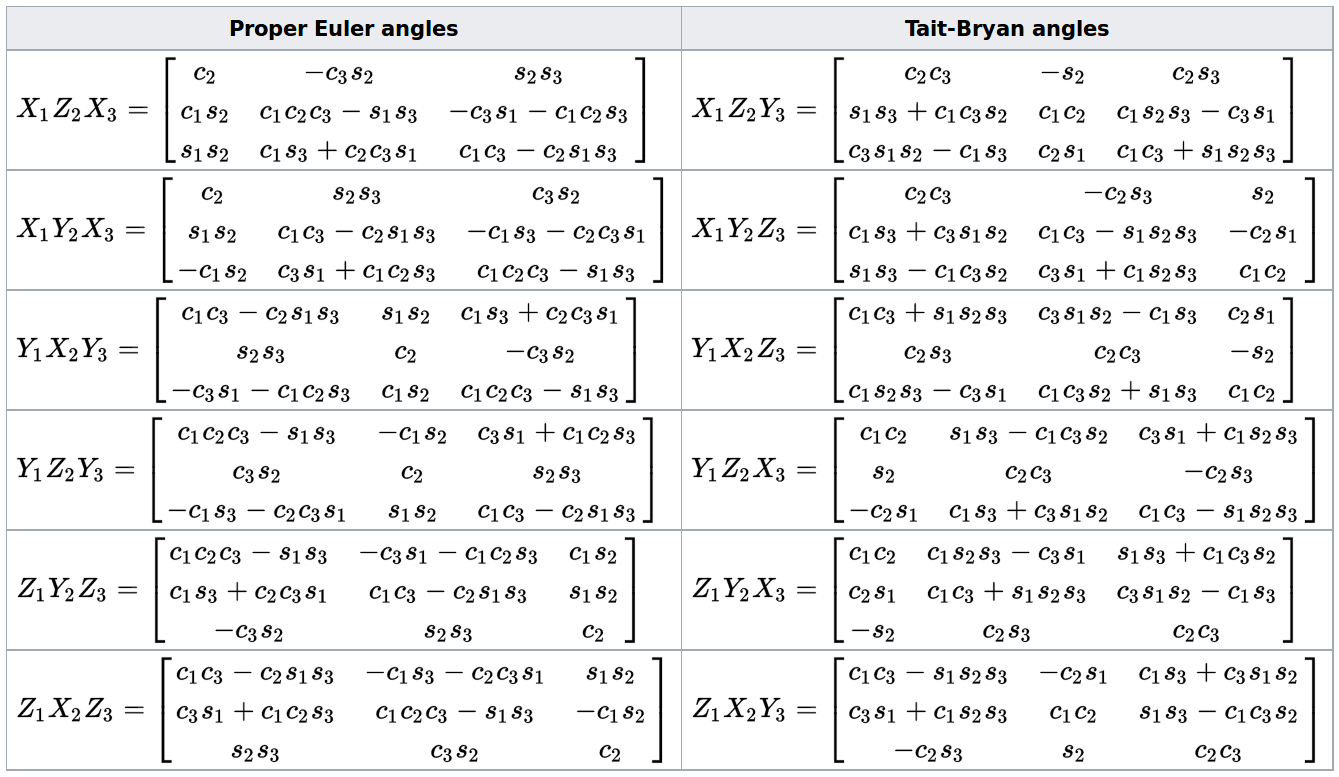
Pan Tilt Roll Rotation Matrix
3d Rotations Part 1
Retrieve Yaw Pitch Roll From Rvec Opencv Q A Forum
Https Www Cs Cornell Edu Courses Cs4620 2015fa Lectures 11transforms3dweb Pdf

Base

A Head Pose Euler Rotation Angles Note That The Z Axis Indicates The Download Scientific Diagram

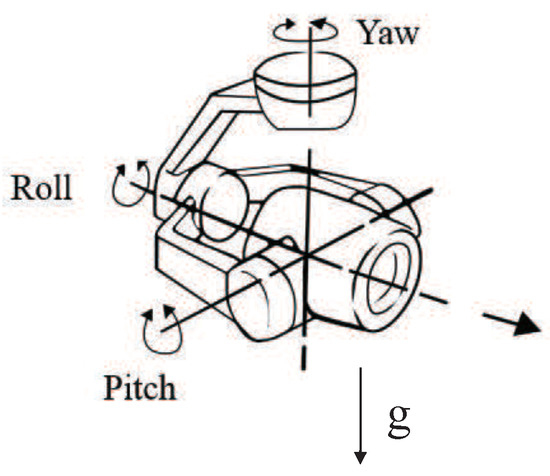
A General Three Link Pan Tilt Roll Camera Positioner Download Scientific Diagram
Note on angle ranges.
Pan tilt roll rotation matrix.

Tilt Roll And Pan Explained Uav Falcon
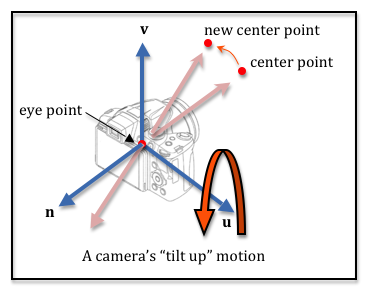
7 5 Rotating A Camera Learnwebgl

Quadrotor With A Pan Tilt Roll Camera Positioner Download Scientific Diagram

A 3 Link Camera Positioner Configurable For Tilt Pan Roll Operating Download Scientific Diagram
Https Www Cis Upenn Edu Cis580 Spring2015 Lectures Cis580 02 Camera Geometry Pdf
Http Www Cs Cornell Edu Courses Cs4620 2012fa Lectures 05transformrotations Pdf

Cool Emerald Rotations In 3d Space Using Euler Angles
Http Www Cs Cornell Edu Courses Cs4620 2017sp Slides 09transformations Pdf
Pdf Control Of Pan Tilt Mechanism Angle Using Position Matrix Method
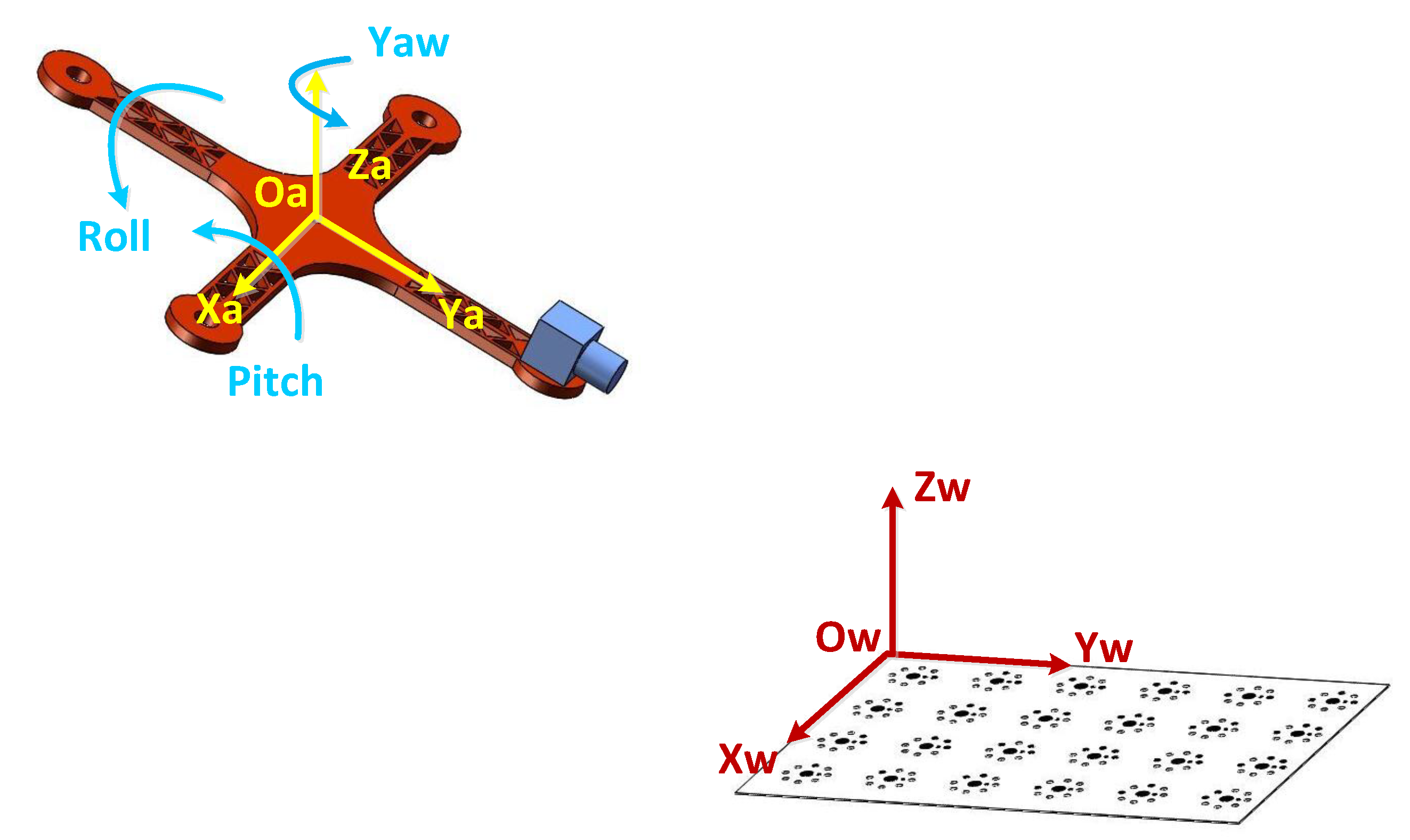
Sensors Free Full Text Measurement Of Unmanned Aerial Vehicle Attitude Angles Based On A Single Captured Image Html
Opengl Camera
Http Lup Lub Lu Se Student Papers Record 8982019 File 8982023 Pdf

Pdf Camera Pan And Tilt Estimation In Soccer Scenes Based On Vanishing Points
Https Link Springer Com Content Pdf 10 1007 S10846 017 0522 9 Pdf

Pdf Method For Pan Tilt Camera Calibration Using Single Control Point

Gimbal Orientation Study And Assessment For The Autonomous Underwater Vehicles Sciencedirect
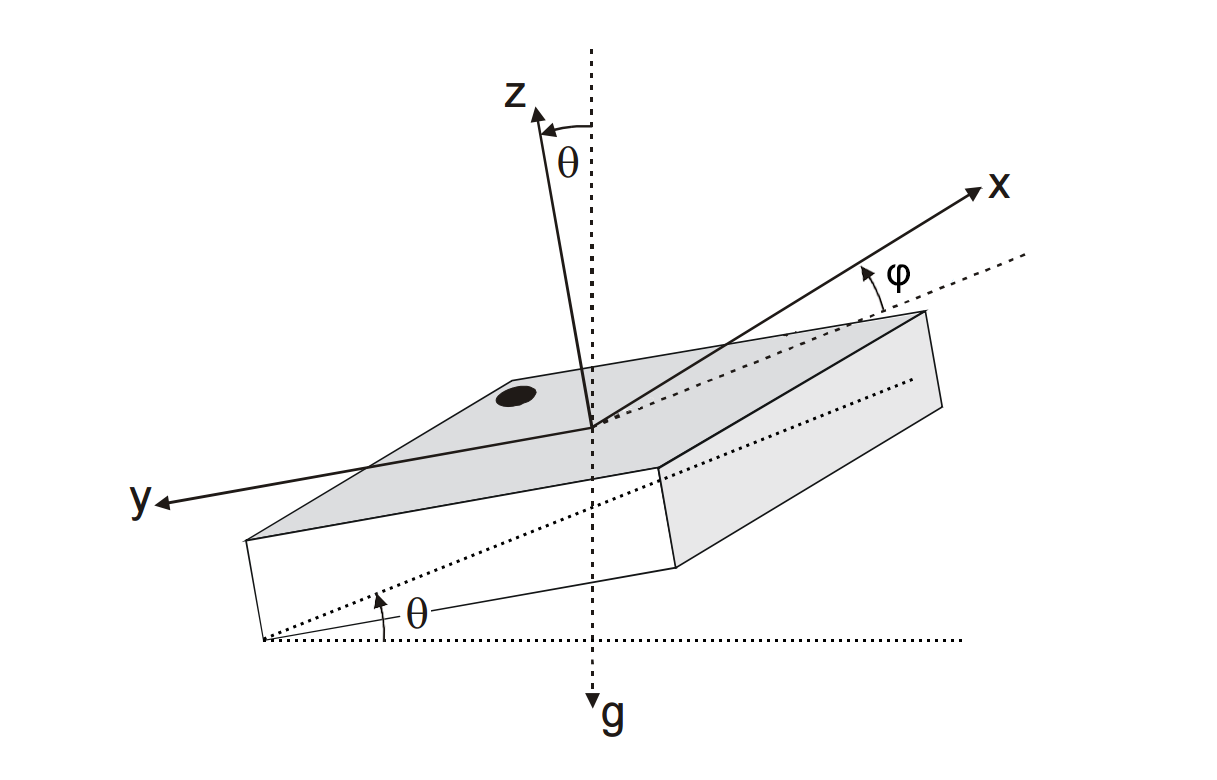
How To Use A Three Axis Accelerometer For Tilt Sensing Dfrobot

Camera Matrix Matlab
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcsh0rgabba6p6fjcsq 5bztobiljeua5buo6l2t1ft3mh9s2o9z Usqp Cau
Sensors Free Full Text Obtaining World Coordinate Information Of Uav In Gnss Denied Environments Html
Aw A Wireless Base Station User Manual Manual Xsens Technologies

New Coordinates By 3d Rotation Of Points Calculator High Accuracy Calculation
Https Openaccess Thecvf Com Content Wacv 2020 Papers Zhang Deepptz Deep Self Calibration For Ptz Cameras Wacv 2020 Paper Pdf
Https Www Mdpi Com 2076 3417 10 15 5064 Pdf
Source : pinterest.com
